| 1.1 |
Reka Bentuk Mekatronik |
Konsep mekatronik telah diperkenalkan oleh Tetsuro Mori (1969).
Tetsuro Mori telah mendefinisikan mekatronik sebagai aplikasi elektronik dan teknologi komputer untuk mengawal pergerakan sistem mekanikal suatu produk.
| Reka Bentuk Mekatronik |
Reka bentuk produk atau sistem yang menggabungkan disiplin ilmu elektrik, mekanikal, elektronik, kawalan dan pengaturcaraan untuk mencapai tujuan yang dikehendaki.
|
| Revolusi Industri 1.0 |
Revolusi Industri 2.0 |
| Penggunaan reka bentuk mekanikal bagi menggantikan tenaga manusia dalam penghasilan produk. |
Penemuan tenaga elektrik yang membolehkan penghasilan produk dalam kuantiti yang lebih besar dan cepat. |
| Revolusi Industri 3.0 |
Revolusi Industri 4.0 |
| Penggunaan meluas reka bentuk elektronik dan penggabungan reka bentuk untuk menghasilkan reka bentuk mekatronik. |
Penggabungan reka bentuk mekatronik bersama Internet benda, data raya dan pengkomputeran awan bagi membentuk pengeluaran pintar. |
| Konsep Cyberphysical |
|
Mengawal dan mengurus operasi industri dengan mengguna pakai sistem mekatronik, internet benda, data raya, pengkomputeran awan dan kecerdasan buatan (artificial intelligence).
|
| Teras dalam Revolusi Industri 4.0 |
|
Robot Berautonomi
Perpaduan Sistem
Internet Benda
Simulasi
Pembuatan Bahan Tambah
Pengkomputeran Awam
Realiti Terimbuh
Data Raya
Keselamatan Siber
|
| Elemen Asas Kejuruteraan dalam Mekatronik |
|
Sistem Elektrik
Sistem Mekanikal
Sistem Elektronik
Sistem Kawalan dan Pengaturcaraan
|
| Sistem Elektrik |
| Sistem yang menggunakan arus elektrik, sama ada arus terus (AT) atau arus ulang-alik (AU) sebagai sumber bekalan kuasa. |
| Sistem Mekanikal |
| Gabungan beberapa komponen mekanikal yang berfungsi sebagai penghantar untuk memindahkan suatu sumber gerakan (motor) kepada bentuk yang lain. |
| Sistem Elektronik |
| Susunan dan sambungan fizikal komponen elektronik dalam suatu litar bagi menjalankan operasi sesuatu sistem. |
| Sistem Kawalan |
| Satu kaedah kawalan sistem yang digunakan untuk mengurus, mengarah atau mengawal atur tindakan bagi memastikan reka bentuk mekatronik berfungsi secara automatik dengan sempurna. |
| Pengaturcaraan |
| Proses untuk membangunkan atur cara komputer dengan menggunakan bahasa pengaturcaraan dalam kod berbentuk teks atau blok arahan yang sedia ada. |
| Bahasa Pengaturacaraan dalam Kod Berbentuk Teks |
Bahasa Pengaturacaraan dalam Blok Arahan Sedia Ada |
|
Java
Phyton
Visual Basic
C++
|
Scratch
mBlock
JavaScript Block
Ardublock
|
Setiap bahasa pengaturcaraan mempunyai set peraturan sintaks (syntax) dan semantik (semantic) tersendiri.
Set peraturan ini menetapkan cara menulis arahan untuk mikropengawal yang mengawal operasi alat elektronik.
| Sistem |
Kereta Kawalan Jauh |
| Sistem Mekanikal |
Mengurangkan atau meningkatkan halajau dan menambah daya kilas.
Komponen: Gear
|
| Sistem Elektronik |
Menerima dan menukarkan isyarat input dari alat kawalan jauh kepada isyarat elektrik bagi memacu motor AT.
Komponen: Pemacu Elektronik & Modul Geganti
|
| Sistem Elektrik |
Sebagai sumber tenaga elektrik.
Komponen: Bateri & Motor AT
|
| Sistem Kawalan dan Pengaturcaraan |
Mengawal halaju dan arah putaran motor AT.
Komponen: Mikropengawal
|
| Sistem |
Pintu Gelangsar Automatik |
| Sistem Mekanikal |
Membuka dan menutup pintu.
Komponen: Takal, Tali Sawat & Gear
|
| Sistem Elektronik |
Mengesan sebarang pergerakan dan memberikan isyarat kepada sistem kawalan.
Komponen: Penderia Gerakan & Litar Pemacu Motor
|
| Sistem Elektrik |
Membekalkan tenaga elektrik pada keseluruhan sistem.
Komponen: Motor AT & Pengubah (transformer)
|
| Sistem Kawalan dan Pengaturcaraan |
Memproses isyarat input dari penderia gerakan dan menghantar isyarat output kepada pemacu motor AT untuk membuka dan menutup pintu.
Komponen: Sistem Kawalan
|
| Sistem |
Mesin Basuh Automatik |
| Sistem Mekanikal |
Menghasilkan putaran pada dram ketika mencuci pakaian.
Komponen: Tali sawat & Takal
|
| Sistem Elektronik |
Memberikan arahan operasi mengikut pilihan pengguna.
Komponen: Panel kawalan & Papan Litar Tercetak
|
| Sistem Elektrik |
Membekalkan tenaga elektrik kepada sistem kawalan motor dan motor AU.
Komponen: Motor AT & Pengubah
|
| Sistem Kawalan dan Pengaturcaraan |
Menghasilkan tindakan kawalan terhadap sistem elektrik, sistem elektronik dan sistem mekanikal.
Komponen: Papan Mikropengawal
|
| Gambar Rajah Blok |
| Suatu lukisan yang mewakili litar atau elemen yang dilukis dalam bentuk blok. |

Tanda anak panah menunjukkan urutan blok dan dilabelkan mengikut fungsi, nama elemen atau litar yang terlibat.
Bahagian input berfungsi menerima dan menghantar isyarat daripada peranti masukan kepada bahagian pengawal untuk diproses.
Isyarat akan diproses mengikut pengaturcaraan yang telah ditetapkan.
Bahagian output akan menjalankan tindakan selanjutnya melalui peranti keluaran.
| Gambar Rajah Blok Kereta Kawalan Jauh |

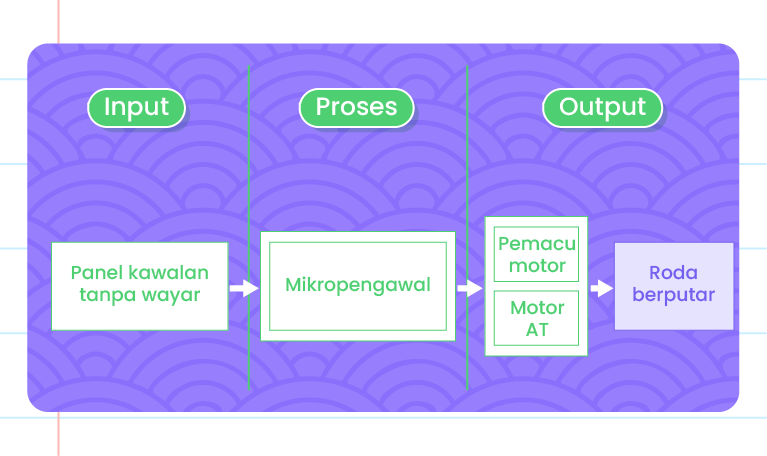
Panel kawalan pada telefon pintar bertindak sebagai pemancar isyarat (transmitter).
Isyarat input akan dihantar kepada mikropengawal (receiver).
Pemacu motor dan motor AT akan menggerakkan roda seperti yang diarahkan oleh mikropengawal.
| Gambar Rajah Blok Pintu Gelangsar Automatik |

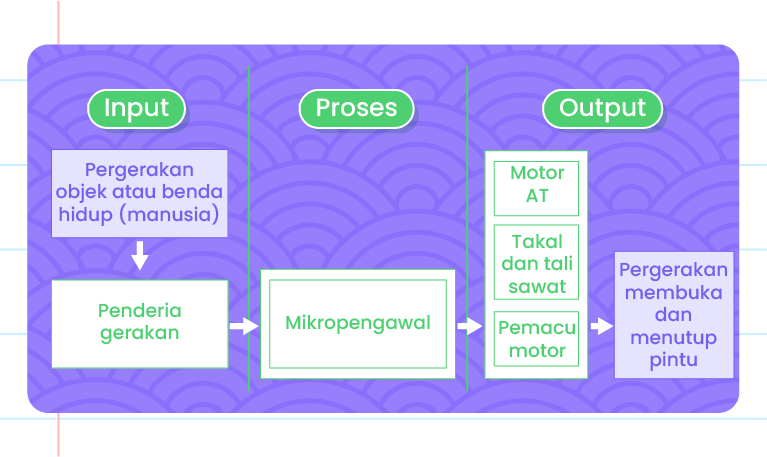
Sebarang pergerakan akan dikesan oleh penderia gerakan dan isyarat input akan dihantar kepada sistem kawalan yang terdiri daripada mikropengawal.
Isyarat kawalan kemudiannya dihantar kepada motor AT yang digabungkan bersama mekanisme takal dan tali sawat untuk mengerakkan pintu.
| Gambar Rajah Blok Mesin Basuh Automatik |

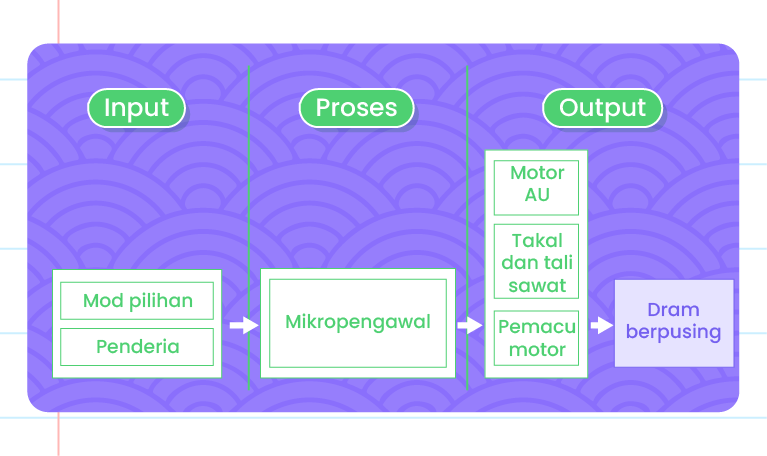
Isyarat input daripada mod pilihan pada panel kawalan dihantar kepada sistem kawalan yang terdiri daripada mikropengawal.
Penderia juga memberikan isyarat input apabila air di dalam dram telah penuh.
Isyarat kawalan akan menggerakkan motor AU yang digabungkan bersama mekanisme takal dan tali sawat.
Analisis fungsi dijalankan bagi mengenal pasti masalah yang terdapat pada produk mekatronik.
Model fungsi dapat menunjukkan gambaran keseluruhan hubung kait antara komponen dan fungsi bagi produk tersebut.
Analisis berantai punca-kesan dijalankan bagi mengenal pasti punca dan kesan bagi masalah.
| Masalah Kereta Kawalan Jauh |
Cadangan Penyelesaian Masalah |
| Mudah rosak apabila berlanggar dengan halangan |
Menggunakan perintang peka cahaya sebagai input untuk mengesan tahap pencahayaan. |
| Sukar dikawal apabila di kawasan yang gelap |
Menggunakan penderia inframerah sebagai input untuk mengesan jarak selamat. |
Kaedah penyelesaian masalah inventif secara pemisahan masa digunakan kerana masalah tersebut hanya berlaku pada waktu tertentu.
Konsep prinsip inventif yang dipilih bagi menyelesaikan masalah tersebut ialah tindakan awal (prelimenary action).
Gambar rajah blok kereta kawalan jauh tersebut perlu diubahsuai pada bahagian yang akan dilakukan pengubahsuaian.
Lakaran perkembangan idea juga akan diubah suai berdasarkan gambar rajah blok yang dibuat.
Lakaran perkembangan idea yang dipilih akan dipersembahkan dalam bentuk lakaran 3D bermaklumat.
| Kriteria Pemilihan Lakaran bagi Reka Bentuk Produk |
|
Menarik Perhatian Pengguna
Warna Seimbang dan Sesuai
Bentuk Mudah Dihasilkan
Mempunyai Nilai Estetika
Maklumat Lakaran yang Lengkap
|
| |
Hadapan Kereta |
|
Cadangan Penambahbaikan
|
LDR - mengesan tahap pencahayaan & menghantar isyarat input
Lampu LED - menyala apabila menerima arahan daripada mikropengawal
|
| Tindakan |
Memasang LDR & LED.
Membangunkan pengacaraan supaya LDR dapat mengesan tahap pencahayaan dan mikropengawal menghidupkan lampu.
|
| |
Atas Bumbung Kereta |
| Cadangan Penambahbaikan |
Penderia Inframerah - mengesan jarak antara halangan & menghantar isyarat
Pembaz - berbunyi apabila menerima arahan daripada mikropengawal
|
| Tindakan |
Memasang penderia inframerah dan pembaz
Membangunkan pengaturcaraan supaya penderia inframerah dapat mengesan halangan dan mikropengawal memberhentikan motor AT dan menghidupkan pembaz secara serentak
|
| Langkah-langkah Proses Penambahbaikan pada Kereta Kawalan Jauh |
|
Membuat Lakaran
Memilih Bahan
Membuat Pengaturcaraan
Membina & Memasang
Membuat Kemasan
Produk Akhir
|
Ujian parameter digunakan bagi menilai kefungsian produk mekatronik mengikut objektif yang telah ditetapkan.
Ujian perlu dijalankan dalam situasi sebenar untuk menilai keberkesanan penambahbaikan terhadap kefungsiannya.
Penilaian kefungsian reka bentuk produk mekatronik yang telah diubah suai turut mengambil kira keupayaan produk, nilai estetika dan keselamatan reka bentuk.
Maklumat daripada penilaian kefungsian digunakan untuk penambahbaikan supaya produk yang dihasilkan memenuhi objektif yang telah ditetapkan.
| Penambahbaikan |
LDR & Lampu LED |
| Ujian Parameter |
Kereta kawalan jauh digerakkan ke kawasan gelap untuk menguji kefungsian lampu LED.
|
| Keputusan Positif Ujian Kefungsian |
Lampu LED berfungsi apabila melalui kawasan gelap
|
| Penambahbaikan |
Penderia Inframerah & Pembaz |
| Ujian Parameter |
Kereta kawalan jauh digerakkan ke kawasan yang mempunyai halangan untuk menguji kefungsian penderia inframerah.
Pengujian juga bagi kefungsian pembaz apabila penderia inframerah mengesan halangan.
Ujian dilakukan sebanyak 3 kali.
|
| Keputusan Positif Kefungsian |
Kereta kawalan jauh berhenti secara automatik dan mengeluarkan isyarat bunyi apabila terdapat halangan di hadapan .
|
Berdasarkan pada keputusan pengujian, didapati kereta kawalan jauh mampu menjalankan fungsi yang dikehendaki.
Cadangan penambahbaikan pada kereta kawalan jauh boleh dilakukan untuk meningkatkan lagi kualiti dan keupayaannya.
| Cadangan Penambahbaikan pada Kereta Kawalan Jauh |
|
Meningkatkan kemampuan kawalan supaya kereta kawalan jauh dapat dikawal dengan menggunakan pergerakan isyarat tangan.
Kelajuan kereta kawalan jauh yang boleh dikawal.
Meletakkan komponen seperti span di bahagian hadapan kereta kawalan jauh yang berfungsi sebagai penyerap hentakan.
|